
\[ \]
\[ \]
\[ \]
Issue No 68, 10 November 2025
By: Anthony O. Ives
There are three common types of rotor systems, the older traditional articulated rotor systems as well as the teetering rotor systems however modern helicopter generally use hingeless/bearingless rotor systems with advances in modern composites. This blog aims to explain each type of rotor system.
The ability of rotor blades to flap is important to the helicopter controllability as well as reducing the effects of dissymetry of lift. The pilot's controls change the pitch angles on the rotor blade which cause the blade to flap in the desired direction however, if the blades were not able to flap the pilot's controls would have no effect. I will talk about dissymetry of lift and other effects of blade flapping later in the article however, further description and analysis of rotor systems can be found in references [1], [2] and [3].
I will introduce the first type of rotor system, the articulated rotor system. The articulated rotor system uses hinges to allow the blades to flap up and down, the can have lead-lag hinges also referred to as drag hinges, which allow blade to move back and forth in the plane of rotation. A bearing allows the blade pitch angle to be changed. Articulated rotor blades usually have a hinge offset which means the hinge location are not at the hub which gives a control moment hence more control authority, this will be discussed more later when we come to discuss 2 bladed teetering rotor systems. See the diagram below for some further explanation.
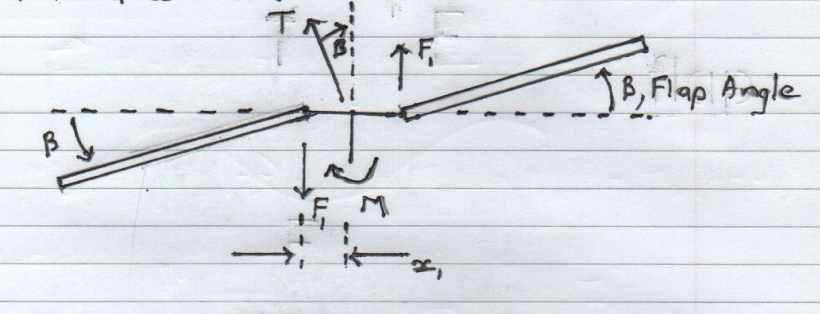
Where notation in the diagram is defined as follows T is thrust, β is flap angle, x is the hinge offset distance from the rotor hub, F is the thrust from the individual blade transferred into the hinge, M is moment transferred into rotor hub and helicopter fuselage.
Typical helicopters with articulated rotor systems are Airbus Helicopters H125 Écureuil or Squirrel (previously the Eurocopter AS350, Eurocopter was also formally the french corporation Aérospatiale), UH-60 Black Hawk (known as Sikorsky S-70 in the civilian world) and the SH-3 Sea King (known as Sikorsky S-61 in the civilian world).
The next rotor system I am going to discuss is the hingeless rotor. The hingeless rotor system as its names implies has no hinges and relies on the blade structure to be flexible enought to flap, etc. With articulated rotor systems the blades are typically metallic where as hingeless are made from composite materials. Articulated rotors assume the blade structure is rigid as it does not flex hence why they require a hinge. Metallic materials are more prone to fatigue than composite materials hence why metallic rotors are articulated and not hingeless. See the diagram below for a further explanation of hingeless rotor systems.
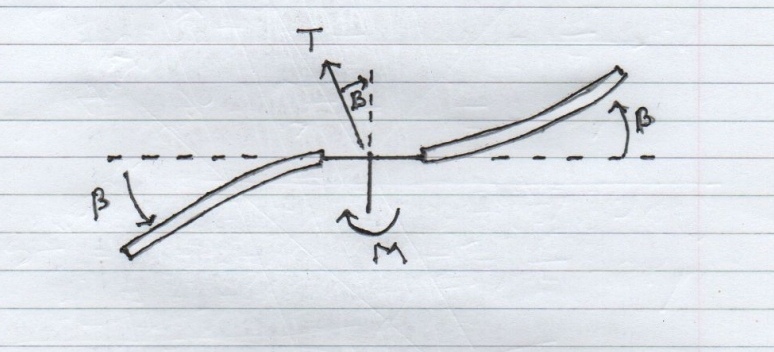
As in the previous diagram, T is thrust, β is flap angle, M is moment transferred into rotor hub and helicopter fuselage.
Modern composite material allow rotor blade to structurally bend by the required amount to maintain helicopter controllability. Composite materials have allowed modern helicopter rotors to become bearingless as well, which is essentially just allowing the blade to twist structurally doing away with a need for pitch bearings. Bearingless/hingeless rotor also require less maintenance as there is less moving parts that can wear out. Airbus helicopters (formally Eurocopter) EC135 is example of a helicopter which uses a bearingless rotor system as does the most modern military version of the 'Huey', the Bell UH-1Y Venom.
The teetering rotor is the next common rotor system usually for two bladed helicopters. The teetering rotor system essentially works like a seesaw as one side flaps up the other side flaps down. The advantage of the system is is simplicity however, the disadvantage of the system is that it is prone to mast bumping. The diagram gives a further explanation of the teetering rotor system.
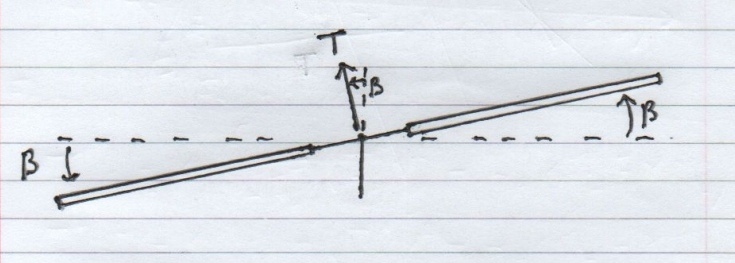
As in the previous diagram, T is thrust, β is flap angle.
Mast Bumping can be caused by a negative g push over manevrer which requires rotor thrust to reduce to zero, the tail rotor thrust can cause the helicopter to roll as there is no rotor thrust component to counteract. Two bladed semi rigid rotors usually use a teetering rotor which cannot transfer moment in to the air frame unlike articulated rotors with offset hinges and hingeless rigid rotors.
Typical helicopter types that use a teetering rotor are the Robinson helicopters, such as the R22, R44 and R66. The vietnam era 'huey' used a two bladed teetering rotor system and experienced the first known cases of mast bumping. The star of the old 1980s 'Airwolf' television series was a Bell 222 which also has a two bladed teetering rotor system, but the Bell 222 has hinge springs which allows the rotor to transfer a moment into the airframe reducing the possibility of mast bumping.
Mast bumping grounded the entire 'huey' fleet at one point during the vietnam war resulting in the US Army making a training video on how to avoid it [4], see below:
Dissymetry of lift is another reason why helicopter rotor blades need to flap. Dissymetry of lift is experienced by helicopters in forward flight due to the advancing blades having a higher airspeed than the retreating blades. This speed difference is caused by the forward airspeed which increases the advancing blade by the amount of the helicopter's forward airspeed and reducing by the same amount on the retreating side. For further explanation see picture below.
This difference in airspeed will cause a diffence in lift, causing the advancing to flap up and the retreating side to flap down if uncorrected this would cause the helicopter to roll to the retreating side. This is prevented by blade flapping as the flapping induces a downwash on the advancing side and an upwash on the retreating side. Downwash reduces the rotor blade angle of attack on the advancing blades hence reducing lift. The opposite happens on the retreating blades which overall reduces the effect of dissymetry of lift.
Inflow roll is something that I got confused with and thought was the result of dissymetry of lift however, while some of the aerodynamic mechanisms are similar it happens for a different reason and unlike dissymetry of lift causes a roll to the advancing side. Inflow roll is mainly experienced in transition to forward flight due to helicopter rotating forward which induces upwash on the leading edge of the rotor dish and downwash on the trailing edge of rotor. This has a similar effect as dissymetry of lift by creating a difference in lift. However, with inflow roll the gyroscope effect causes the usual 90 degree lag hence why the roll is to the advancing side.
Tip Path Plane (TPP) and Non Feathering Plane (NFP) are terms you may come across however, they are really just two difference reference planes for rotor disk aerodynamics.
Tip Path Plane is simply the plane defined by the path of rotor tips, no flapping would require certain values of longitudinal and laterial cyclic pitches, (θ1s)TPP and (θ1c)TPP respectively.
Non Feathering Plane is more complicated to explain but is the plane defined by the path of blade section chordline extended out to length of the blade diameter/radius (diagram below may explain it better), therefore zero cyclic pitch would give certain value of longitudinal and laterial Flap angle, (β1c)NFP and (β1s)NFP respectively. An alternative explaination would be that it is the plane the rotor would spin in if cyclic pitch is zero or in theory if the pilot held the cyclic stick centered?
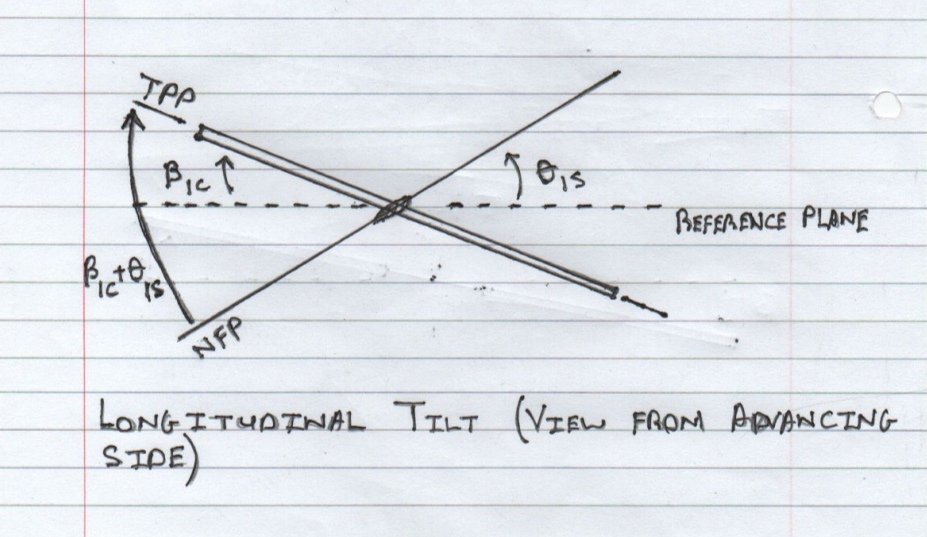
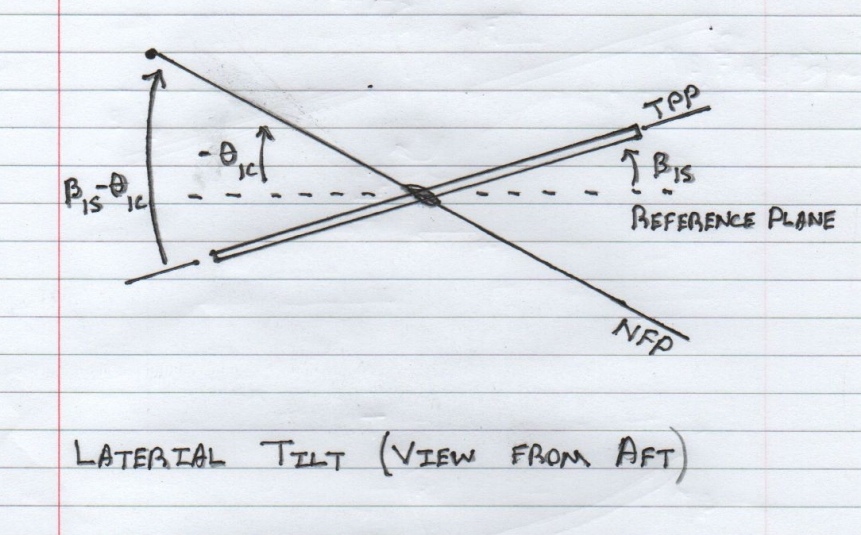
Equations below define the relationship between TPP and NFP:
\[\beta_{1s} - \theta_{1c} = (\beta_{1s})_{NFP} = -(\theta_{1c})_{TPP}\]
\[\beta_{1c} + \theta_{1s} = (\beta_{1c})_{NFP} = (\theta_{1s})_{TPP}\]
Where β1s is laterial cyclic flap angle, β1s is longitudinal cyclic flap angle, θ1c is laterial cyclic pitch angle and θ1s is longitudinal cyclic pitch angle.
There are some other reference planes that are sometimes used. Hub Plane (HP) is a plane pendicular or normal to the rotor shaft axis its usually used as a general reference plane, the Control Plane (CP) is the best described as the swashplate plane as its the plane that the swashplate rotates in. The pictures below may give some further explanation of the different reference planes.
Please leave a comment on my facebook page or via email and let me know if you found this blog article useful and if you would like to see more on this topic. Most of my blog articles are on:
Mathematics
Helicopters
VTOL UAVs (RC Helicopters)
Sailboat Design and Boatbuilding
If there is one or more of these topics that you are specifically interested in please also let me know in your comments this will help me to write blog articles that are more helpful.
References:
[1] Helicopter Theory, Wayne Johnson, 1980, Dover Publications
[2] Rotary Wing Aerodynamics, W. Z. Stepniewski and C. N. Keys, 1979, Dover Publications
[3] Principles of Helicopter Flight, 2nd Edition, W. J. Wagtendonk, 2006, Aviation Supplies & Academics
[4]US Army Mast Bumping Training Video, https://youtu.be/_QkOpH2e6tM?si=Th5gW8d4hVojfumN
![]()

Disclaimer: Eiteog makes every effort to provide information which is as accurate as possible. Eiteog will not be responsible for any liability, loss or risk incurred as a result of the use and application of information on its website or in its products. None of the information on Eiteog's website or in its products supersedes any information contained in documents or procedures issued by relevant aviation authorities, manufacturers, flight schools or the operators of aircraft, UAVs.
For any inquiries contact: [email protected] copyright © Eiteog 2023